
LASS L-Angled Small System - Page 2
David Hunt - Gray, Tennessee, USA March 26, 2000
THE PARTS
- 2 standard size servos (Futaba S3003)
- 1 mini-servo (HiTec HS81)
- R/C receiver (Futaba FP-R127DF)
- Battery (Futaba NR-4QB 4.8 Volts, 600mAh)
- On/Off Switch w/ Futaba connectors
- Aluminum 1" by 1/16" by 7.75"
- Aluminum 3/4" angle 1/16" thick
(you will need this piece as long as your standard servos are wide.) - 10+ 4mm X 12mm round head bolts w/ nuts
- 1+ Nylon 4mm X 12mm round head bolts w/ nuts
- One 1/4" round head bolt-Metal or Nylon
(see text about length) - Nylon spacer 1/4"
- 3/16" plywood, 6" by 6"
- 1/4" wooden dowel (2 ft.)
- small eyebolts or small pulleys
- small wire ties
- rubber bands
THE TOOLS
- Screwdrivers (various sizes)
- Drill
- Drill bits (5/32"; 1/4"; 5/16")
- Vise or clamps
- Hack saw
- Lineman Pliers (for bending)
- Needle-nose pliers (nut tightening)
- Dremel tool (optional)
- Dremel cutter bit (#38177)
CONSTRUCTION
The Main Frame
You may choose to start this project with a different brand of R/C equipment or servos with bearings if you like. I started with what I had on hand. Remember that the pan servo will have to be converted to 360º operation. I have only seen the inside of a S3003 so I can't speak about modification of other types of servos. Simon Harbord's "dumb servo" conversion may be adaptable to this system, but I am unfamiliar with this conversion and will have to wait till it is published by Simon.

1. Construction begins with cutting a length of 3/4" aluminum angle that is as wide as one of the standard size servos. For the S3003 this is about 13/16".
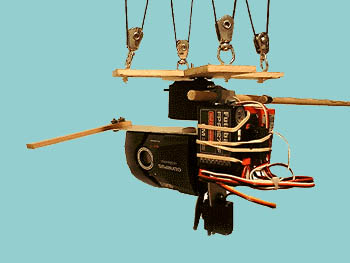
2. Very carefully drill 5/32" holes and attach the two servos using 4mm nuts and bolts. You want the angle to butt up to the servo casing. In the photo above the top servo is the Pan Servo and the servo I'm holding is the Tilt Servo.
NOTICE that the output shaft of the Pan Servo is near the angle, and the output shaft of the Tilt Servo is away from the angle. This is important for the rig's balance and for camera clearance during tilt movements.
See Addendum, page 7 for design improvements
See separate Article about 360º servo conversion.